Built for real production variation.
High product variation
The system had to handle more than 400 product types.
Changing pallet layers
Layer patterns and product positions were not always fixed.
Carton separators
The robot also had to remove carton sheets between layers.
Cycle-time pressure
The active layer had to stay close to the robot to reduce movement time.
A complete robotic workflow, not just a robot arm.
The solution connected vision, gripping, robot motion, layer handling, and pallet height control into one working system.
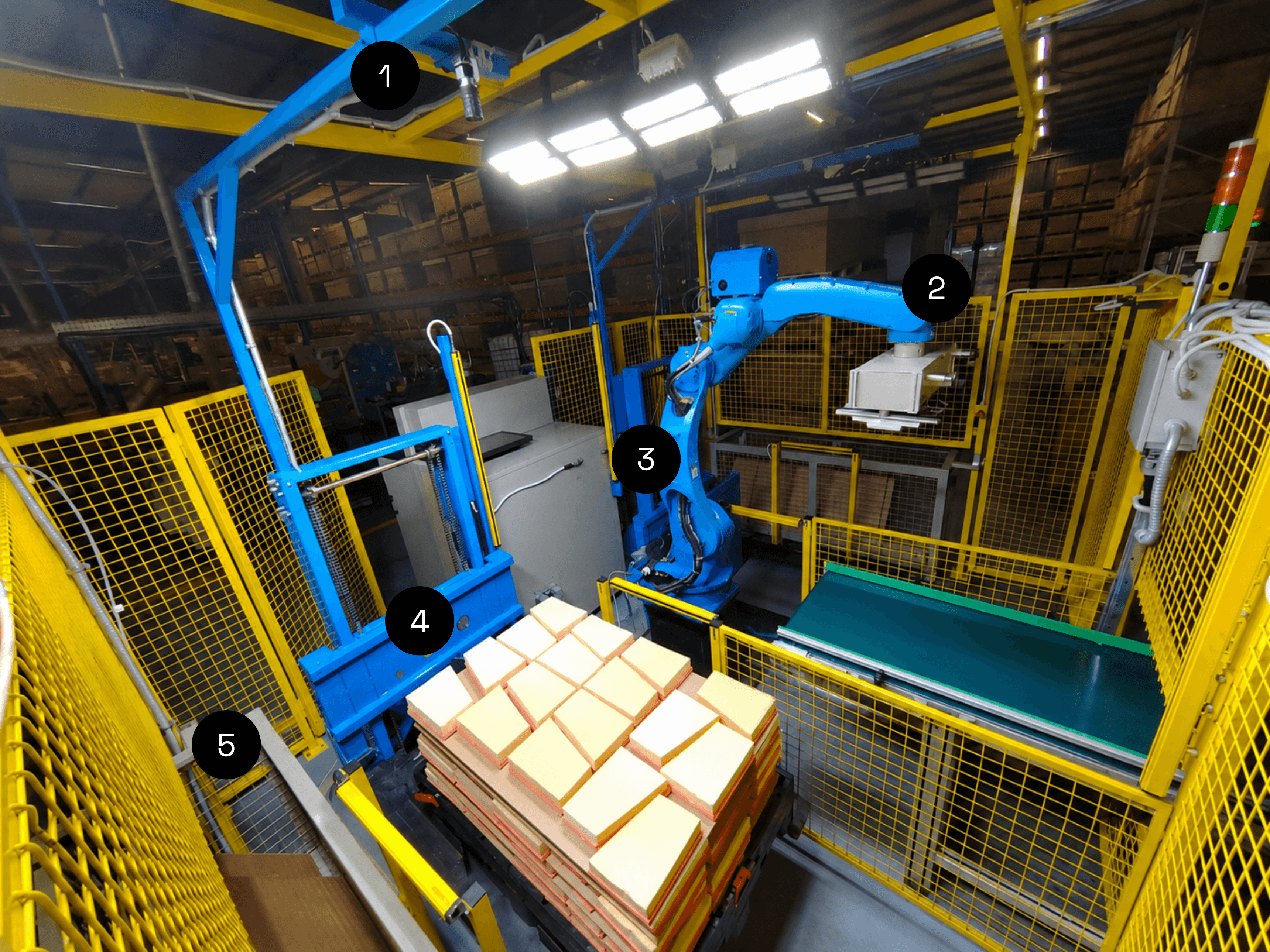
Integrated depalletizing cell with vision, gripper, robot, elevator, and carton separator magazine.
Computer vision
Detects and localizes products.
Custom gripper
Handles products and removes carton separators.
Robot motion
Moves based on product position and process logic.
Elevator system
Keeps the upper layer at an optimal picking height.
Carton separator magazine
Supplies carton separators for interlayer handling.

Custom end-of-arm tooling for product and carton handling.
Custom gripper for product handling and layer separation.
The gripper was developed for the real task, not selected from a catalog only.
Product handling
Designed for high product variation.
Carton removal
Removes carton sheets between pallet layers.
Process fit
Built around the full depalletizing workflow.
Vision
Self-developed computer vision for flexible picking.
The vision system detected products on the pallet and provided position information for robot motion.
- Product detection
- Position estimation
- Adaptive picking
- Works with product variation
- Reduces dependency on fixed layer patterns
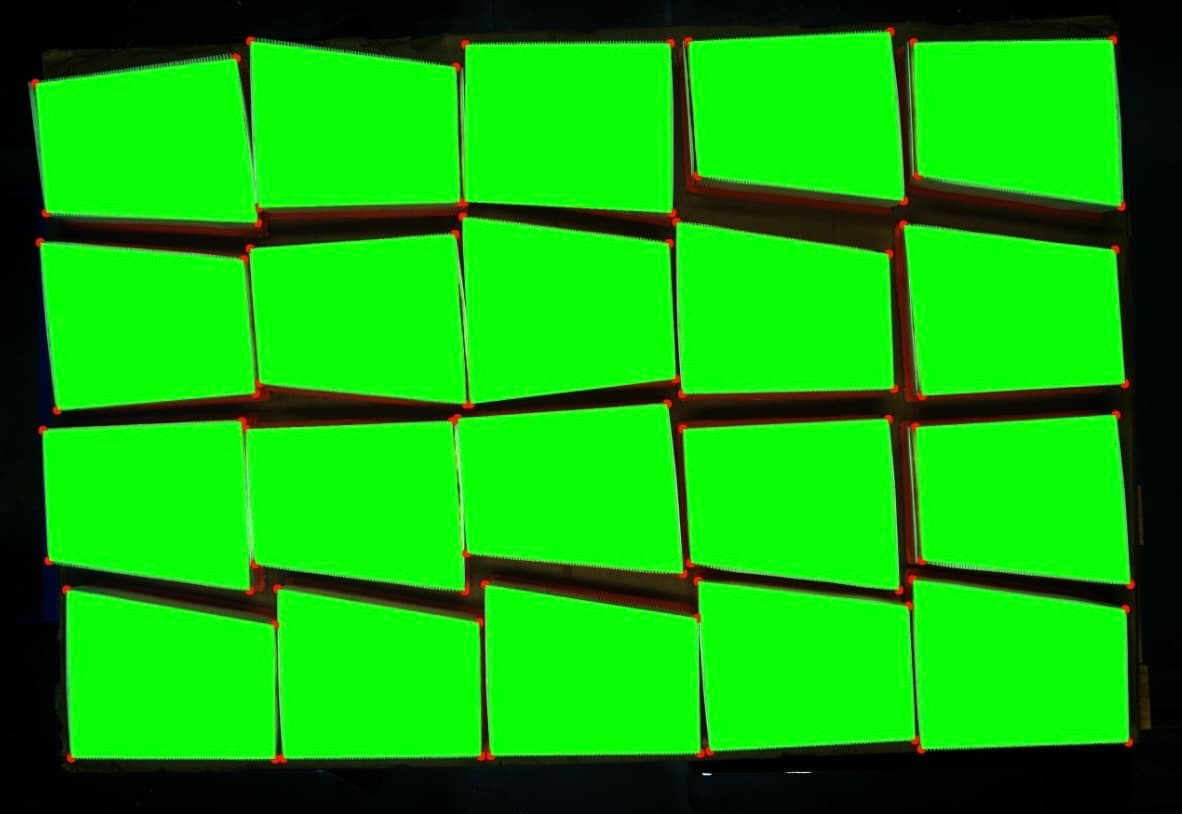
Computer vision view with simplified detection overlay.
Keeping the active layer close to the robot.
The elevator kept the upper pallet layer at a consistent height. This reduced unnecessary robot travel and helped shorten task time.
Less robot travel. Better reachability. Faster handling.
Elevator
Keeps the upper pallet layer at a consistent height.
Robot
Stays closer to the active work area instead of chasing the pallet downward.
Result
Better reachability, less travel, and a tighter handling cycle.
Capabilities demonstrated
Computer vision
Product detection and localization.
Custom tooling
Gripper design for real handling tasks.
Material handling
Depalletizing, layer handling, and product flow.
Robot integration
Connecting vision output with robot motion.
Process engineering
Optimizing reachability, movement, and cycle time.
System integration
Bringing mechanics, sensors, software, and robotics together.
Relevant for similar automation challenges
From automation need to working robotics system.
This project shows Birdwave’s core strength: integrating vision, gripping, mechanics, software, and robot motion into real industrial workflows.
The value is in the integration layer.